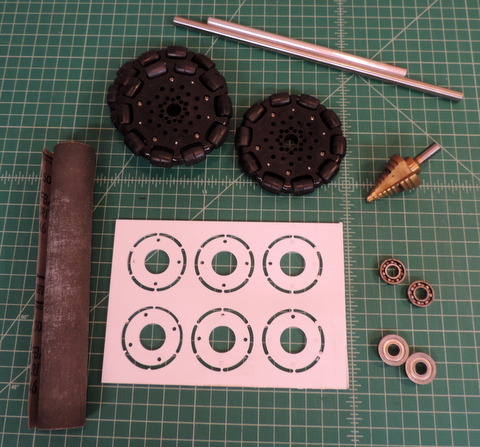
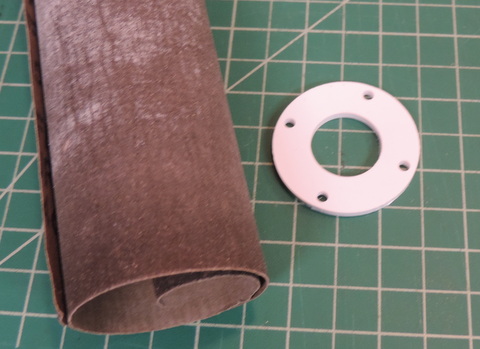
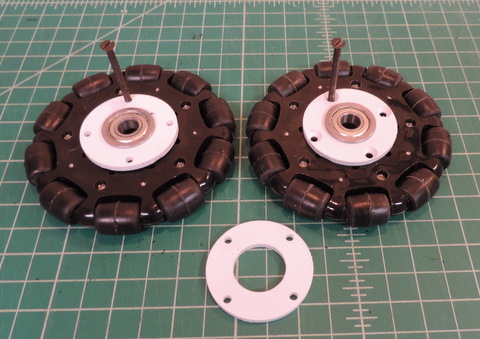
 | Left:
The assortment of parts we're starting with. The CNC panel of
bearing mounts is version 1 and will be updated. (It's parts for only 4
wheels, Version 2 will have twice as many parts.)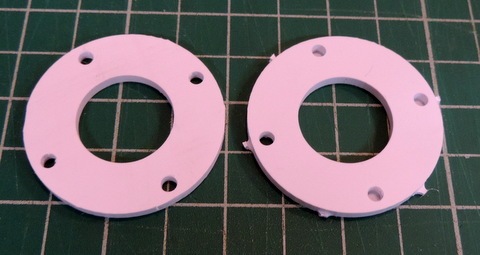
Above:
remove the parts from the panel & trim off the tabs. Not shown in
this version, one spacer of each set of 3 will have countersunk holes,
another one will have a recess for the hex nut. The third one is used
as a spacer between the two wheels. |
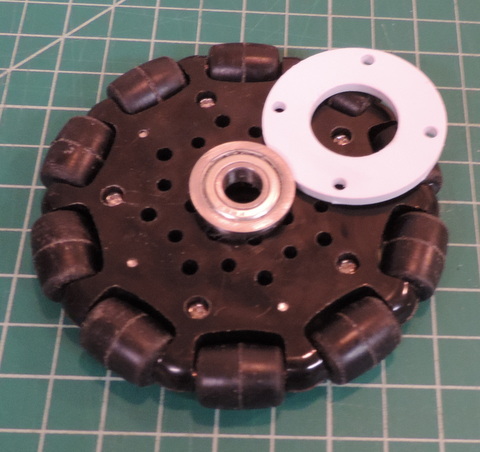
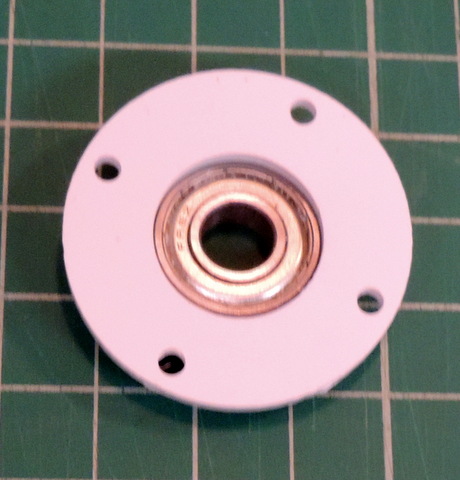 | Left: The bearing , most likely, will not fit in the bearing mount. It's intended to be a tight fit.
Below: To enlarge the hole roll a sheet of fine sandpaper with the grit out.
 |
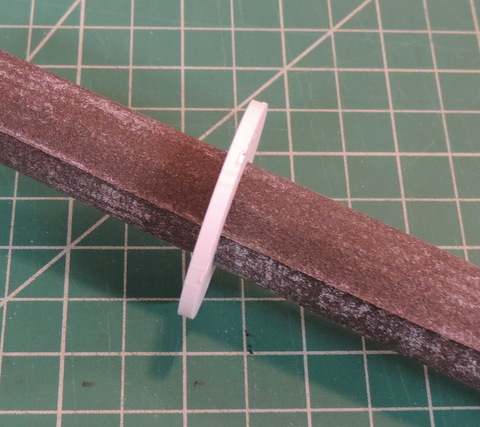 | Left:
Slide the roll into the bearing mount and let it unroll. Then
slide it back and forth a few times - check the fit. It won't take much
sanding. Don't over do it!
Below: Bearings in the bearing mounts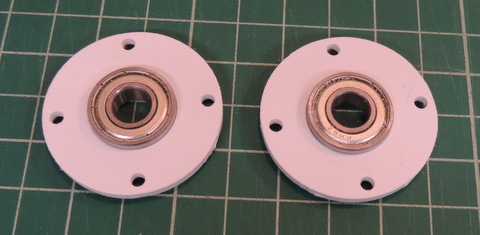 |
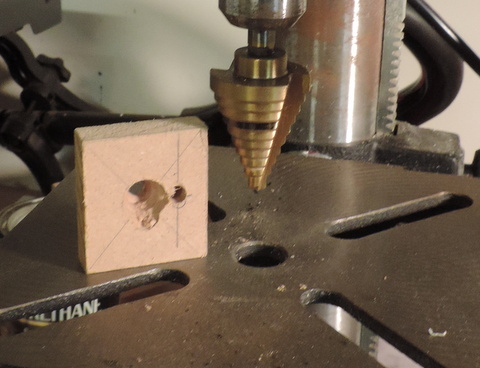
In
order for the bearing to fit you have to enlarge the center bore of the
Servo City Wheels from 1/2 in to 7/8 in. The easiest way to do that is
with a Step Drill. I got mine from Amazon (see parts list ) You only
have to enlarge to a depth of 1/8 inch. I've marked my drill with a
marker so I know where to stop.  | 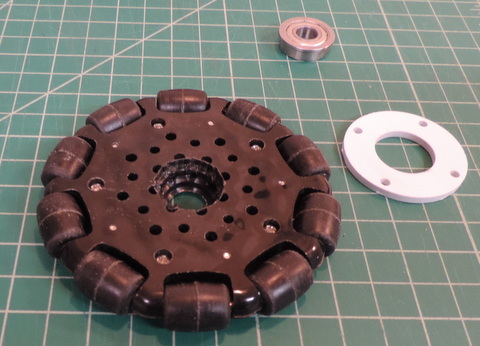
Wheel after bore is enlarged. |
Above:
I put a block of wood under the wheel because the Step Drill extends
through the wheel body. (yes, I've drilled into the table of my drill
press. avoid that if you can - it dulls the drill bits!)
Right:
The swarf will obscure your progress - Turn off the Drill, wait for it
to stop spinning, and clean it off! Then continue... | 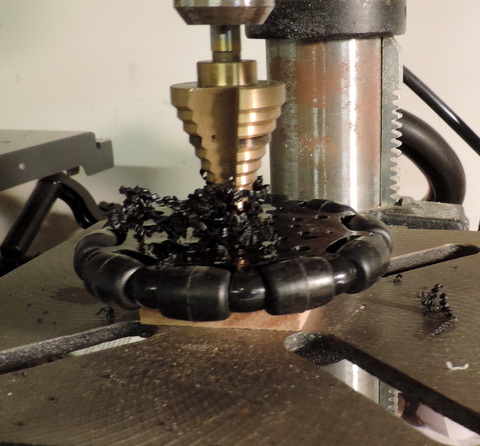 |
Bring one of the bearing mounts with you when you are drilling so you can check the depth of the bore. | 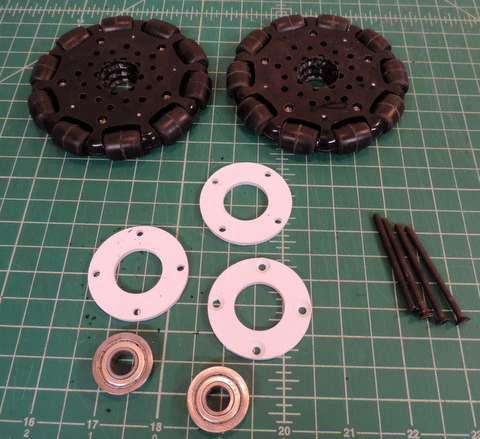
We're
ready to begin assembly. They are hard to see, but I added countersinks
to the holes in one of the mounts. The shop didn't do them in Version 1. |
Use
the screws to align the holes in the bearing mount with the holes in
the wheel. (there are 10 holes in the wheel.). Don't bother doing the
2nd wheel, the bearing mount will pop out while you align the first
wheel with the second one. Note: the screws shown here are actually too
long. You'll have a choice of using 1.5 in screws or 3.0 in screws.
(more later) | 
Turn the first wheel over and slide the space (3rd bearing mount) on over the screws. |

Align the second wheel so that' it's Omni Bearing are centered between the ones of the first wheel. | 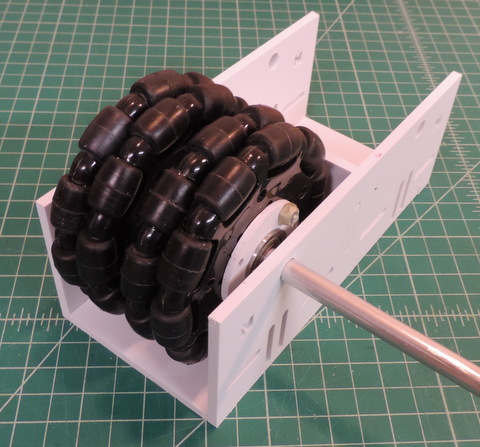
Modify
and Assemble a second set of wheels (Actually 3 more sets!) Install on
your axle with the flat head screws in the center. |
More
to come: Version 2 of the Bearing Mount panel will have a set of 3
spacer rings to be used between the two sets of omni wheels and
on either side of the pair of wheels. As mentioned above one bearing
mount will have CNC cut countersinks for the flat head screws, the
other one will have a hex recess for the Nylon Lock Nuts. I'll also be
experimenting with using 3 in screws so you can lock all 4 wheels into
alignment if you want to. For right now we at least have a workable
alternative.
Click Here for the Parts List |